|
Racial Sensitivity Training for Police(Racial Justice Seed Grant, OSU ODI/OoR, Dept. Electrical and Computer Engineering) This project focuses on the development of software for racial sensitivity ttraining for Columbus Police Dept. |
|
Music, Light, Adaptive Ambience, and Mental Health(BETHA grants (2), Dept. Electrical and Computer Engineering) Stress reduction, attention (ADHD), mood disorders (depression, bipolar illness). Mathematical and computational modeling and analysis. Feedback control theory/engineering. EEG (see left, bottom) and heart rate variability (HRV) signals. Bio-signal generation for auto-generation of music/audio and video. Virtual reality, web sites, apps, psychoeducation and bio-signal driven treatments. For more information, see: "Technology for Mental Health" research group |
|
Humanitarian and Development Engineering(IEEE Foundation; Battelle Engineering, Technology, and Human Affairs Endowment; OSU Outreach and Engagement, Engagement Impact Grant; Fulbright Specialist Scholar) Humanitarian/development engineering is the creation of technologies that help people. In this sponsored work, courses on humanitarian and development engineering are being taught in the developing world and OSU, a book on humanitarian engineering has been written (free download), an international inclusive STEM education (iSTEM) program is being supported (picture on left, children constructing an LED flashlight), and other humanitarian engineering fieldwork activities (see photo at left, in Paraguay), including activities in Columbus OH via Tech4Community. Research is being conducted on the use of control theory for social change (click here or here). Passino is the Director of the OSU Humanitarian Engineering Center |
 |
Engineering Ethics(National Science Foundation, with the National Academy of Engineering) Development of an "online ethics center for engineering and science". This includes developing and evaluating engineering ethics case studies, gathering resource materials (e.g., courses and letures online) for the above web site, and infusing social justice principles into the philosophy and approach of engineering ethics.
|
 |
Smart Lights(Ohio Third Frontier, U.S. Dept. Energy, teamed with Energy Focus Inc.) Future buildings are envisioned to be equipped with two types of sensors for lighting: occupancy sensors and light intensity sensors. Occupancy sensors can be used to determine the pattern of lights that should be turned on or off. Light intensity sensors can be used in energy-saving “daylighting,” the automatic modulation of electric light level depending on what amount of sun is coming in the windows. Research is being conducted on control systems for daylighting so that they provide uniform lighting levels without room-wide lighting oscillations (instabilities) that can result from fast changes in illumination from the windows to a subset of the sensors.
|
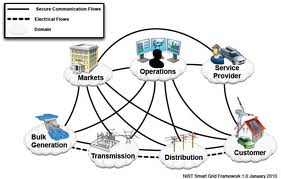 |
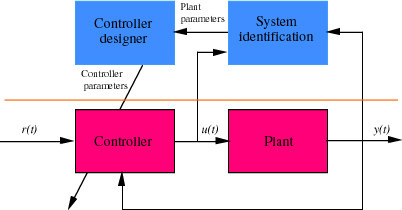
Control and Optimization for the Smart Grid(U.S. Dept. of Energy) Control and optimization methods for the smart grid, including active and reactive power allocation for renewable energy sources in the electrical grid. Education development in the smart grid area includes a course on control and optimization for the smart grid.
|
|
Robust Distributed Decision Making in Biological and Technological Systems(OSU Office of Research, NSF Mathematical Biosciences Institute) The focus is modeling and analysis of robust emergent behavior (e.g., group motion, social foraging, and group choice) with applications to gray jay scatter-hoarding, honey bee social behaviors, multiagent systems (e.g., autonomous vehicles), and multizone temperature control. I have collaborated with Prof. Thomas Waite (OSU Dept. Evolution, Ecology, and Organismal Biology) on several of the above topics and Prof. Thomas D. Seeley (Cornell Univ., Dept. of Neurobiology and Behavior) on mathematical modeling and analysis of honey bee social decision making (nest site selection, social foraging, in-flight swarms).
|
 |
Collaborative Center of Control Science(AFRL/VA, AFOSR) K. Passino was the PI and Director of this center. Four topics were considered: cooperative control for uninhabited autonomous vehicles (UAVs), distributed control for clusters of microsatellites, aerodynamic flow control, and control of reusable hypersonic launch vehicles. For more information, click here.
|
|
|
Intelligent Learning Methods for Autonomous Robots(NIST and DARPA LAGR Program) My role is in the development of an array of learning methods for ground robot navigation, ones that can be implemented in the NIST RCS software for the hardware shown at the left.
|
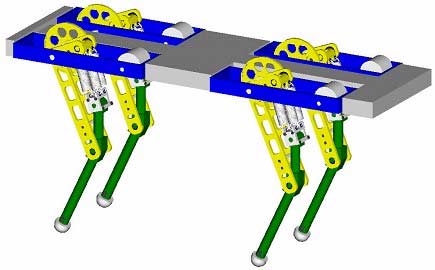 |
Dynamic Maneuvers in Legged Locomotion(National Science Foundation) For this three year project (2002-2005), in collaboration with Prof. Dave Orin (OSU) and Prof. Ken Waldron (Stanford), Passino contributed expertise in evolutionary algorithms for design and biomimicry for engineering walking robots (e.g., for robot maneuver parameter design and control design).
|
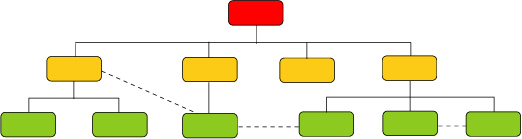 |
Software for Implementation of Hierarchical and Distributed Control Systems(National Institute of Standards and Technology) Three sequential multi-year funded projects have been completed: (1) "Course and Laboratory Experiment Development for the NIST Real-Time Control System (RCS)"; (2) "Development of a Catalog of Decision, Estimation, and Control Algorithms for the NIST RCS Library"; and (3) "RCS for Distributed Implementations of Labview and dSPACE" focused on the development of RCS features, such as networked and decentralized real-time control, in Labview and dSPACE/Matlab, including experimental demonstrations (some work for that is described here). For more information, click here. For some experiments we have developed under this program click here.
|
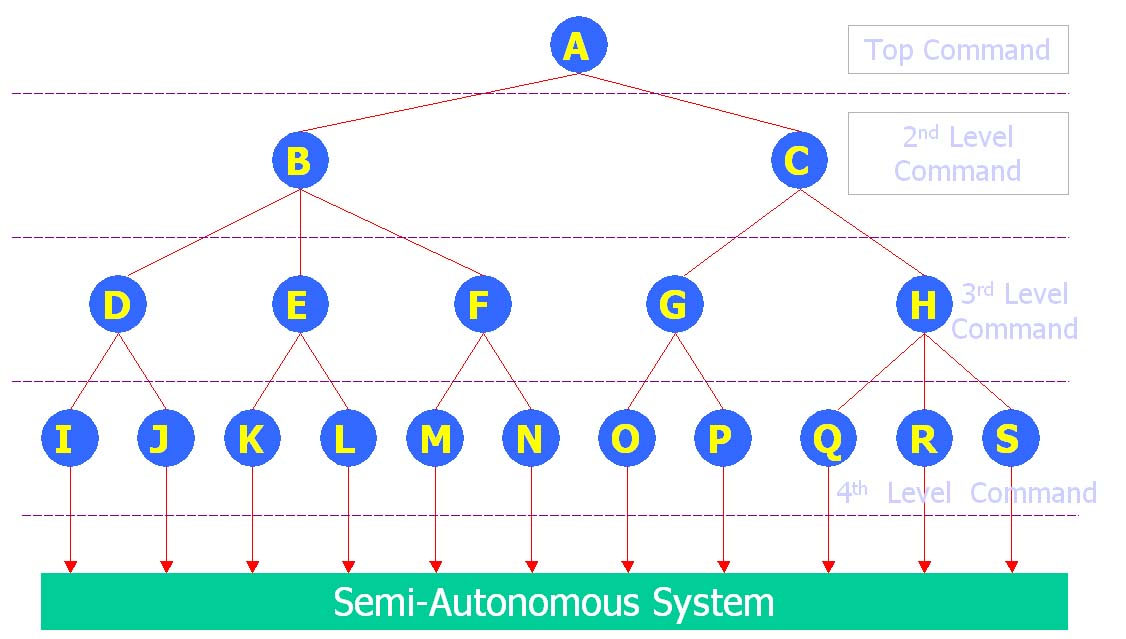 |
Strategies for Human-Automaton Resource Entity Deployment (SHARED)(DARPA MICA program) The overall project focus is on hierarchical game theoretic approaches to automation of military operations with Prof. J. Cruz as the PI. The project went from Sept. 2001-Dec. 2003. Specific tasks examined by Passino and his students included stability analysis of multiobjective swarms with intelligent agents and cooperative path planning.
|
|
|
Cooperative control for Autonomous Air Vehicles(DAGSI/AFRL) The focus in this project is on the development of coordination and control methods for uninhabited autonomous air vehicles. Particular attention is given to distributed planning and learning strategies (e.g., distributed learning of cognitive maps, distributed recursive planning, and combined planning/learning methods), response surface methodology for distributed engagement, and stable swarm behavior for groups of vehicles. A benchmark problem being considered is the autonomous munitions (LOCAAS). Biomimicry of optimal social foraging strategies (where animals work together to find food) is also being considered. For more information, click here.
|
|
|
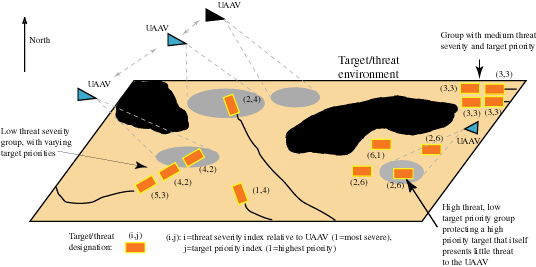
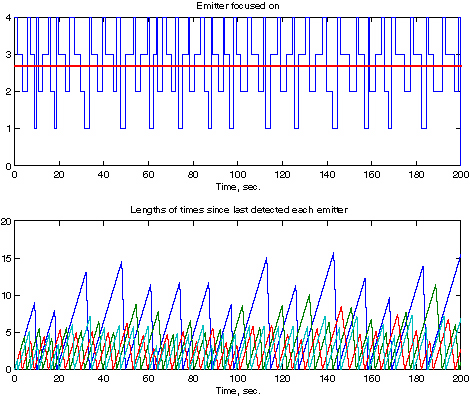
Autonomous Negotiating Teams (ANTS)(DARPA) The OSU focus in this project is on modeling and stability analysis of "distributed dynamic scan scheduling" (DDSS). Here, we develop results for both a single receiver on one platform, and multiple receivers on different platforms that work together to schedule "collaboratively." For more information, click here.
|
|
|
Stability Analysis of Intelligent Control Systems and Distributed Discrete Event Systems(National Science Foundation, Engineering Foundation, others) Several projects have focused on this topic. For instance, the Engineering Foundation supported a project where we studied stability analysis of load balancing in computer networks and scheduling in flexible manufacturing systems (a resource allocation problem). The National Science Foundation supported a project where we studied modeling, controllability, and stability analysis of expert systems that are used as controllers. In particular, we performed modeling and stability analysis for expert control of a process control problem and a distributed resource balancing problem in manufacturing systems.
|
|
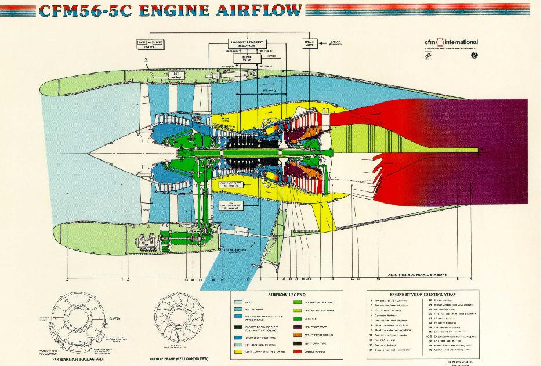
Adaptive Estimation, Control, Diagnosis, and Fault Tolerant Control for Jet Engines(General Electric, NASA) A variety of studies on the development and use of adaptive estimation and control methods in jet engines (including failure diagnosis and fault tolerant control methods) have been conducted. For a list of projects in this area click here.
|
|
|
Nonlinear Adaptive Estimation and Control(General Electric, NASA, NSF, others) A variety of studies have been conducted in the development and use of stable nonlinear adaptive estimation and control methods; particular emphasis has been on the off- and on-line approximation methods using neural and fuzzy systems (i.e., learning control methods). Heuristic methods have also been studied (e.g., adaptive fuzzy control, neural control, genetic adaptive estitimation and control). Applications to jet engines (above), laboratory experiments, and others (below) have been studied.
|
 |
Research-Curriculum Development, Other Applications, and Laboratory Experiments(NSF, GM, others) Current work is focusing on hierarchical, distributed, and networked control systems; see here. A variety of applications of intelligent control have been studied (e.g., for automotive, transportation, aerospace, and process control); for a bit more information and a list of projects click here. The National Science Foundation supported a project "A Research-Curriculum Development Program for Enhancement of U.S. Competitiveness in Intelligent Systems and Control" (co-PI: S. Yurkovich) provided general support for research in intelligent control at OSU in a variety of areas (e.g., from stability analysis to applications) and supported the development of the Intelligent Systems and Digital Control Laboratory.
|