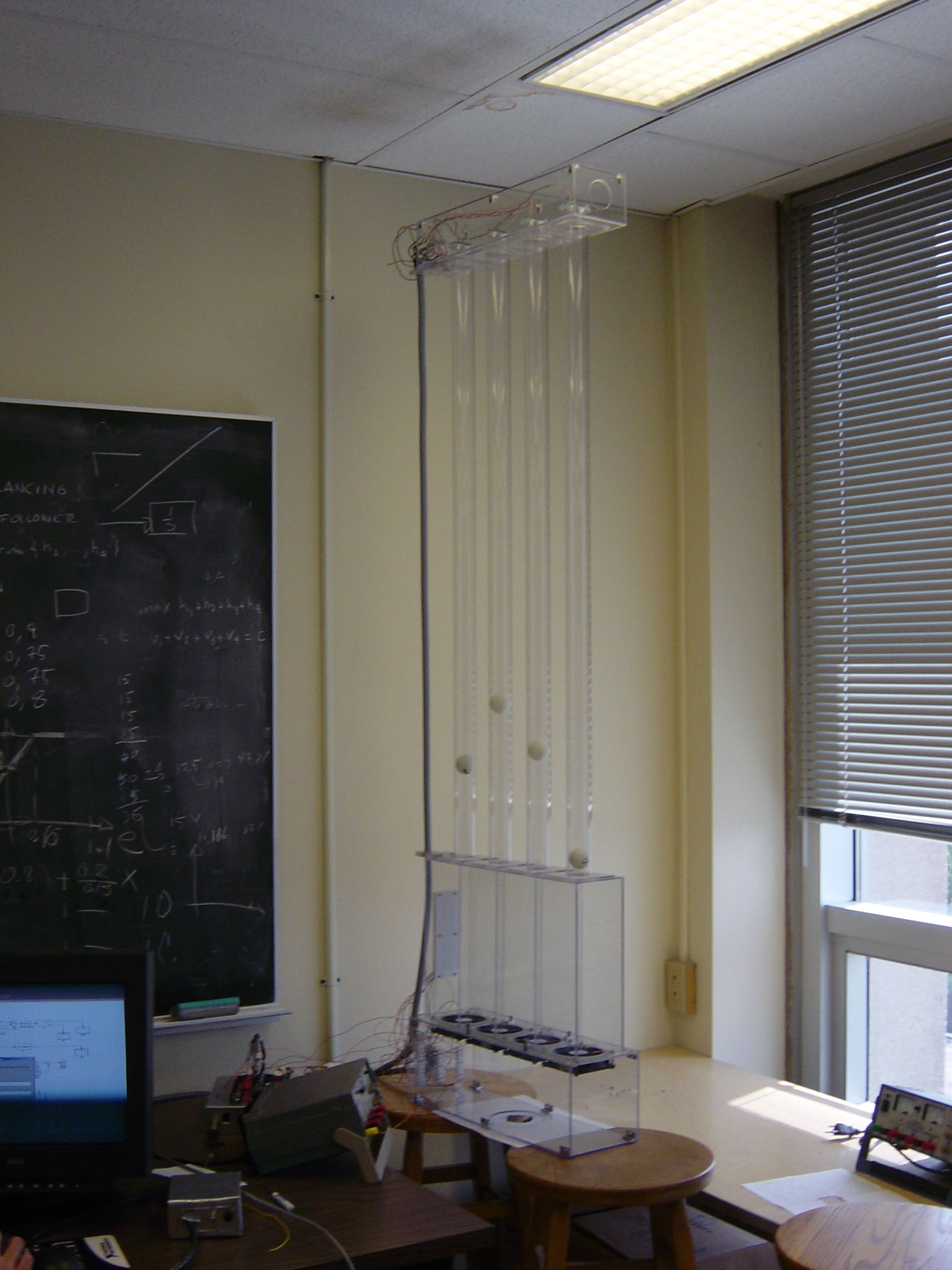
| Dynamic Resource Allocation for Balls in Tubes ("Juggler") |
Description: Use fan to push a ping-pong ball up in a tube and an ultrasonic sensor to sense its height. There are four such adjacent tubes with the fan inlets sharing a common area at the bottom ("manifold") that limits the total possible airflow and the tube outlets also sharing a common area (top). Quantity of airflow into the manifold is adjustable via a hole in the bottom. If one fan tries to push a ball too high, the others fall since they can't be held up since there is not enough airflow available. Challenges: Balancing balls in tubes, trying to allocate air pressure optimally to keep all balls at a uniform height but maximaly elevated. Can study influence of delays/network effects. Disturbances: Noise on the sensor, air turbulence in tube due to spinning fan, air turbulence in manifold. One strategy allows only one fan to lift a ball at a time so it simulates "juggling." Applications: Industrial resource allocation problems (e.g., in the oil industry). |
For a movie of the experiment in operation click here. |
| Cooperative Scheduling for an Electromechanical Arcade |
Description: Lasers (red) and detectors mounted on the shafts of two motors so that they can "fire" and "detect" the presence of a "target." There are eight targets (small black boxes in the semi-circle) that show their presence by illuminating a (red) light directed at each motor detector (and if the motor is pointing at that target it can then "see" it). The targets appear at frequencies that are independent of each other and can be adjusted. Each target has a detector that is triggered if the motor fires at it. We consider a motor (gun) to get a "point" if it successfully finds a target and fires on it when it is "visible." Challenges: Single motor (gun): Like in an arcade try to eliminate a maximum number of targets as they unpredictably and dynamically "pop-up." Two guns: Coordinated fire control where algorithms are developed to schedule in real-time a sequence of firings so as to maximize the number of points the team gets. Can simulate a communication network (e.g., with random but bounded delays) between the two motors. Applications: Biological "attentional" systems, scheduling in hierarchical/distributed systems, cooperative control, games. |
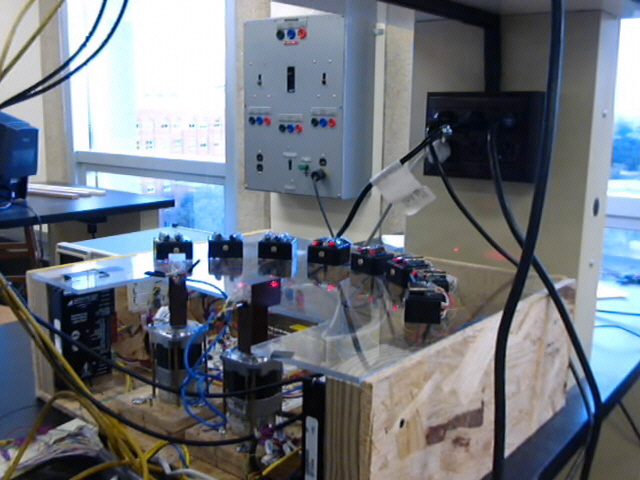
For a movie of the experiment in operation click here. |
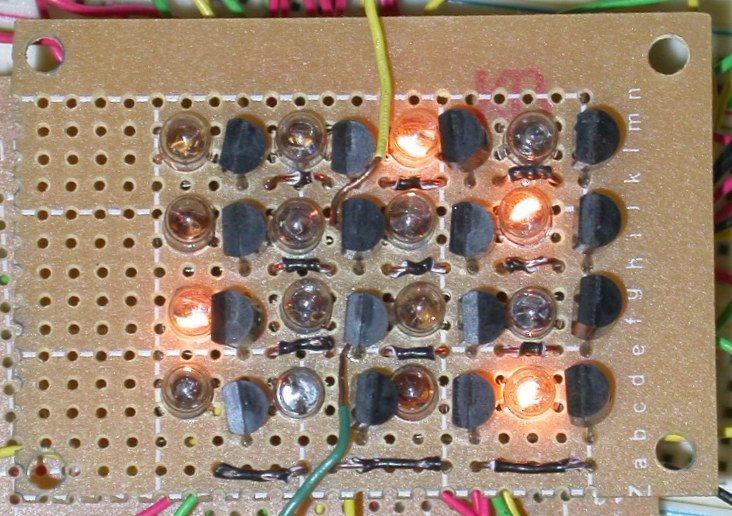
| Uniform Planar Temperature Control over a Network |
Description: Have16 individually controlled zones in a regular grid with lights for heaters and analog temperature sensors (black). Can use on/off or PWM-type inputs. Challenges: Try to regulate temperature to be uniform across the grid but with some fixed (maximum) value or try to make one set of zones track the average temperature in another zone. Decentralized control with different controllers for each zone and a network with random but bounded delays for neighbor-zone sensed information, and delayed control inputs, presents significant challenges. Disturbances: Ambient temperature and wind currents, inter-zone effects, self-induced wind currents. Applications: Temperature control in industry, control over the internet, biomimicry of foraging. |
For a movie of the experiment in operation click here. |
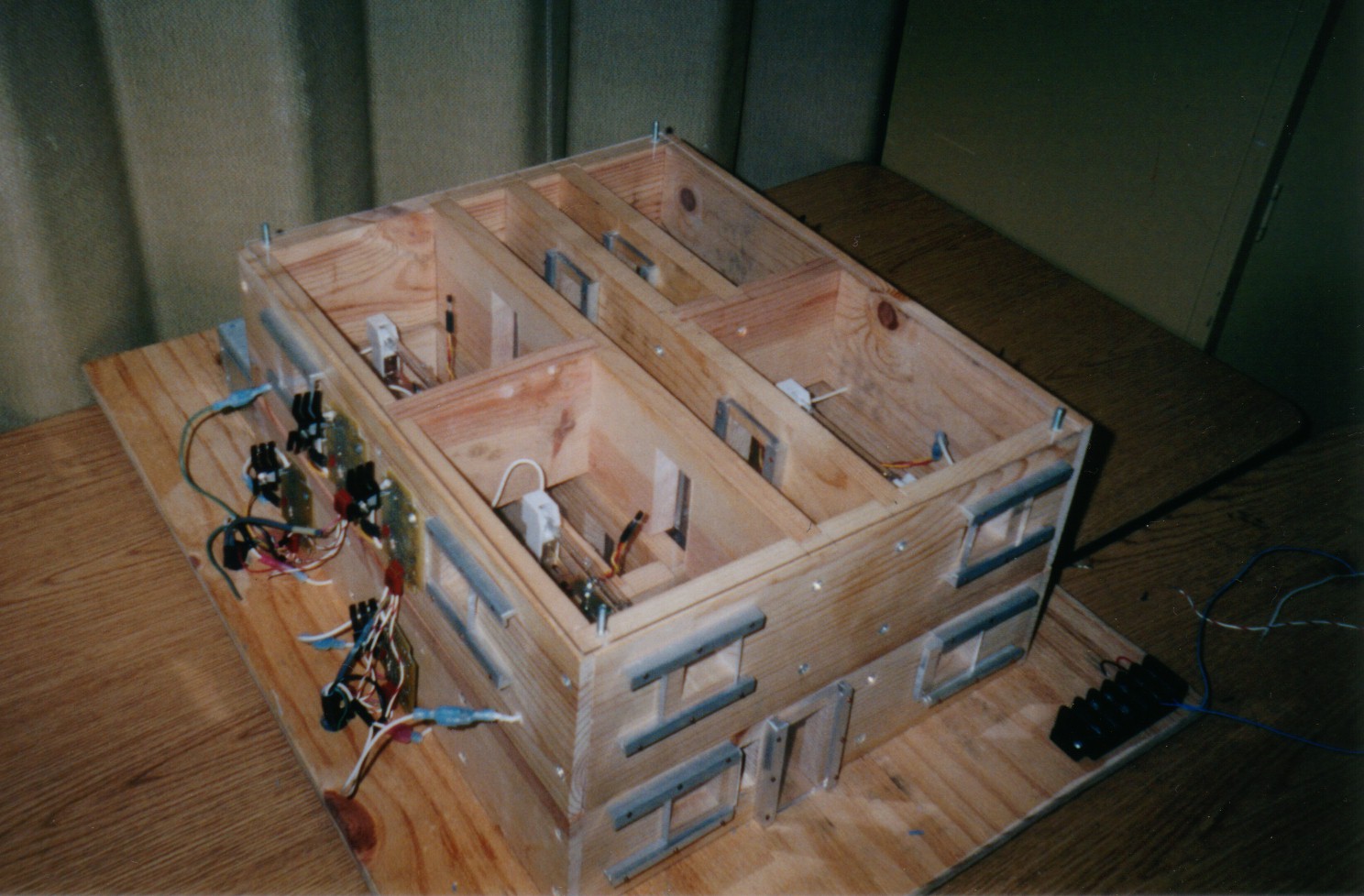
| Building Temperature Control |
Description: Two floor model building. Temperature sensors in each room, heaters in each room, 4 rooms per floor, two floors. Configuration with adjustable halls, doors, windows. Four fans that can be put in either doors or windows. Challenges: Temperature regulation in multiple zones, with interations between zones (proximity of rooms, doors, windows). Disturbances: Ambient temperature, wind through windows, open doors. Applications: Temperature control for process control, buildings, etc. |
|
|
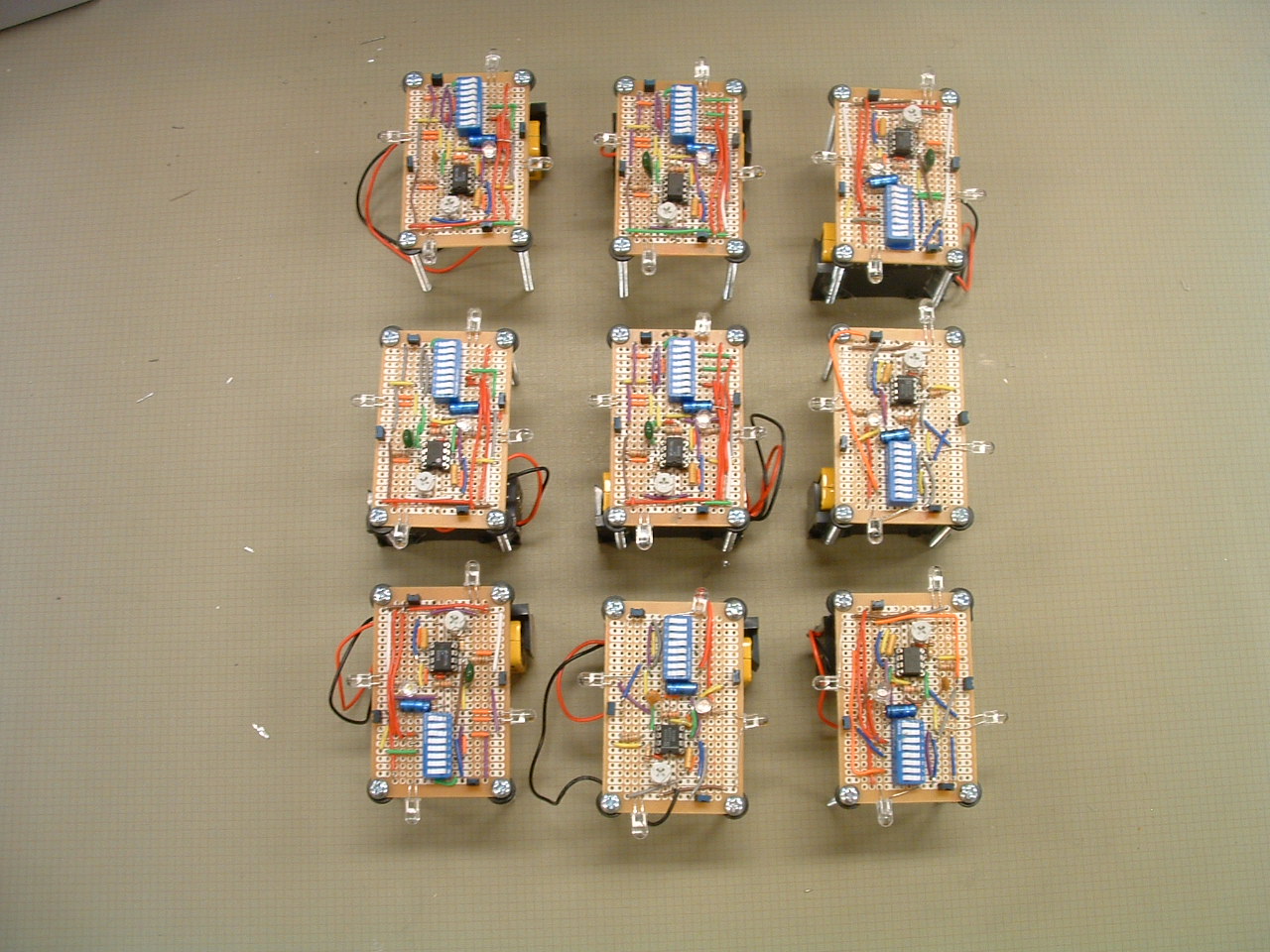
Synchronization of Electronic Fire Flies |
Description: Coupled oscillators, modular/reconfigurable "topology" for interconnections of which oscillators are connected together, communications via LEDs Challenges: Synchronize flashing of lights using limited communications and in presence of component/circuit differences. Applications: Synchronization in distributed computing systems, connections to coupled biological oscillators in humans and other animals. |
Click here, for more details and movies. |
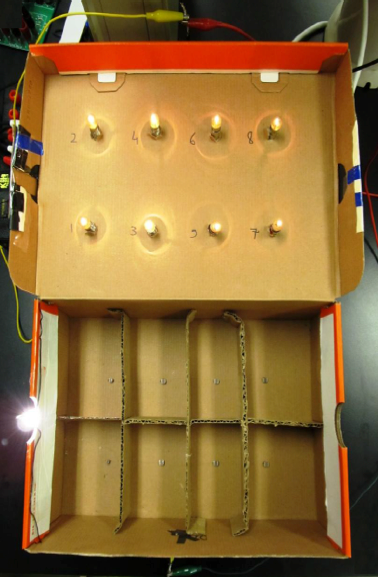
| Smart Lights | Description: There are 8 lamps and 8 light sensors arranged in "zones". There are partitions that can be installed to separate the zones (like partitions in an office building to make cubicles). Changing the partition height changes the amount of coupling between the zones (low or no partitions results in high coupling). There is an extra light (left side) to simulate the effect of the sun coming in a window. The control objective is to achieve either uniform lighting across the base of the testbed, or specific illumination levels in each zone. Challenges: Changes in partitions affect coupling, effect of "sun" light bulb creates a disturbance, effective control without communications between the zones. Applications: Energy efficient control of lights for large commercial buildings. |
 |