Overall Project Objectives:
Develop and evaluate the performance of strategies for distributed
coordination and cooperative control of autonomous air vehicles
that seek to gather information about a dynamic target environment,
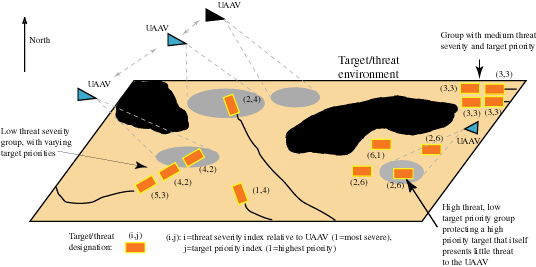
evade threats, and coordinate strikes against targets. A schematic
diagram that shows the types of situations that we will consider
is shown in the figure below.
We will apply the developed approaches to an autonomous munitions (AM) problem. In this case we can consider over 10 AMs, ignore threats, and only focus on how to coordinate a swarm of AMs to effectively eliminate mobile targets.