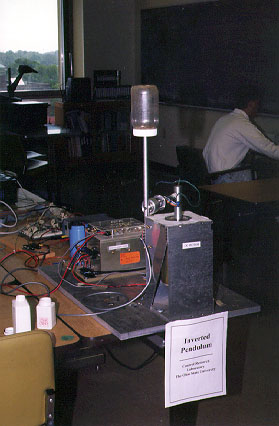
Rotational Inverted Pendulum:
The rotational inverted pendulum is a nonlinear plant that is commonly found
in university control laboratories (often, however, it is of the cart-pole
variety on a track). The inverted pendulum consists of two joints: the rotating
base, and the actual "pendulum''. Note that this system is an "underactuated''
system, as there is only a single input (actuator) to control two outputs.
The inverted pendulum system utilizes two optical encoders to measure the
angular position of both joints at each sampling instant. The optical encoder
outputs are passed through a signal conditioning circuit before being acquired
by the computer. The signal conditioning circuit outputs pulses which are
counted by four separate counter/timers on a data acquisition board installed
in the computer. The signal conditioning circuit is used to double the encoder's
effective resolution, as well as to determine the direction of rotation.
The system is actuated by a DC motor which applies a variable torque to
the rotating base. A servo-amplifier is used to control the DC motor; this
amplifier accepts control inputs from the DAS20's D/A converter in the range
[-5,5] Volts. The inverted pendulum system allows the user to change the
system parameters, or add disturbances, by attaching containers of various
size and contents to the end of the pendulum (e.g., in labs on adaptive
control a container of bolts or water is added to the end of the pendulum
as a disturbance). The mass of the container and its contents significantly
changes the system parameters, while the motion of the contents within the
container acts as a disturbance to the system. For more details on the rotational
inverted pendulum system see:
S. Yurkovich and M. Widjaja, "Fuzzy Controller Synthesis for an Inverted
Pendulum System," to appear in IFAC Control Engineering Practice, Vol.
4, 1996.
M. Widjaja and S. Yurkovich, "Intelligent Control for Swing Up and
Balancing of an Inverted Pendulum Systems," Proceedings of the IEEE
International Conference on Control Applications, Albany, NY (September
1995)