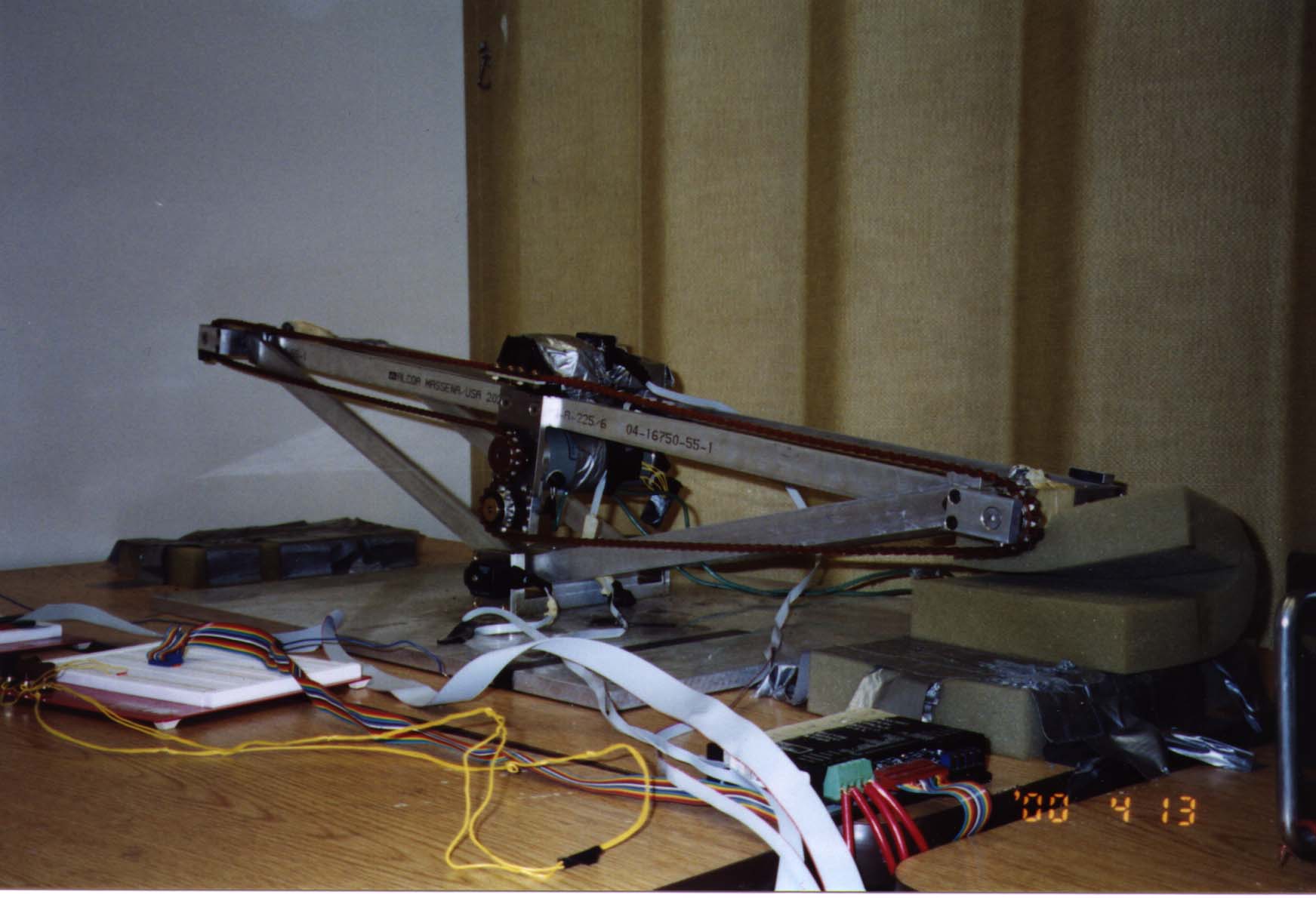
The inverted wedge is balanced by moving a weight across the top of it. The position of the weight and the angle of the wedge are sensed with optical encoders. This experiement was funded by the National Science Foundation Research Experience for Undergraduates Program, (Robotics and Machine Intelligence Program), "Intelligent Controllers for Robotic Systems".
For more information on the control of this experiment see: Moore M.L., Musachio J., Passino K.M., "Genetic Adaptive Control for an Inverted Wedge," To appear in Engineering Applications of Artificial Intelligence, 2001.