The RCS Software Library:An Introduction |
|
For a Romanian translation click here.
Developing a complex real-time control system that can be composed of
several subsystems distributed over multiple computers with (possibly)
different operating systems is not trivial task. Challenging practical
issues surround implementation of such a control system. The RCS Library
was developed in order to facilitate the design and implementation of hierarchical
and distributed real-time control systems for practical real-world problems.
It has numerous features that make the job of the control system designer
easier.
With the use of the RCS Library it is very easy to develop and implement a controller that consists of interdependent computing nodes, is organized in a hierarchical structure, and is (possibly) distributed over different (and possibly incompatible) platforms (such as the one pictured below, that has three "levels" with the lowest level interfacing to various physically distinct portions of the plant, and with the lowest level interfaces implemented via different computers). With the help of the communication tools of the RCS Library, the computing nodes can still be connected to each other while running independently. They can share information even if they are operating on different hardware of software platforms.
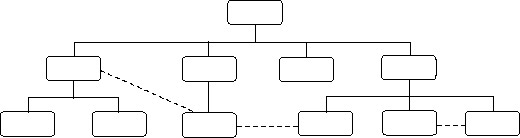
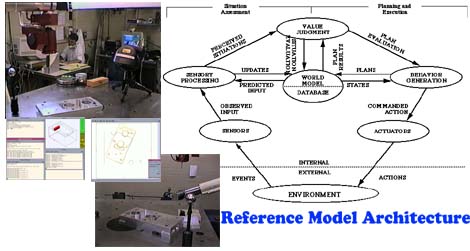
The structure of RMA is regular and therefore easy to understand and
implement. Every module, in the hierarchy of the RMA contains Sensory Processing
(SP), World Modeling (WM), Value Judgment (VJ), and Behavior Generation
(BG) processes, as well as a Knowledge Database (KD). See the above figure.
The WM processes keep the KD current and consistent based on the information obtained from the SP processes. Moreover, they perform jobs such as simulation of possible actions and state prediction, and supply data to other processes.
The JA subprocesses decompose a given job, or task, into N distinct
jobs to be performed by N distinct subsystems.
The SC subprocesses are associated with each subsystem and decompose
a given job for this subsystem into a time sequence of sub-tasks to be
performed.
The EX subprocesses are also associated with each subsystem
and perform the tasks scheduled by the corresponding SC subprocess.
Every RCS system may have different organization and number of layers
in its structure. The RCS system designer decides how to organize the layout
of the controller hierarchy based on the system to be controlled. In other
words, based on the physical layout of the subsystems, the physical and
logical relation between the subsystems and the tasks that the subsystems
can perform.
A typical RCS design starts with a task decomposition analysis of the system. This involves identifying the tasks that each subsystem can perform and analyzing the task sequence scenarios that lead to the desired operation. During this stage the designer also defines the task knowledge and parameters, or basically the information to be stored in the world model and also to be shared between different modules. These include the goals and pre-conditions of the tasks.
The next step in a typical RCS design is to define the controller architecture. During this stage the designer considers the physical subsystems, including all the sensors and actuators, of the system as well as the logical relations between them. We start by assigning an RCS control module for each actuator and corresponding sensors in the lower level of the hierarchy and define the modules in the higher levels based on the subsystems and the information flow.
Having done the task decomposition analysis and completed the controller architecture, the designer breaks down each command, or task request, to a state table of rules. For each of these rules, the sensory conditions, operator requests, and system states are identified.
Having finished the RCS design the engineer faces the practical challenge of implementing the control algorithm. The RCS Library was developed to aid the designer at this stage of the complex control system implementation. Using the RCS Software Library one can overcome the practical challenges of implementing the control modules, the communication between them (which may involve communication over a network and between incompatible hardware and software), the operator interface, etc., very easily. Below we summarize some of the important features of the RCS Software Library.
![]() The Communication Management System (CMS) and Neutral Messaging Language
(NML) are two powerful tools of the the RCS Library. They are used for
communication between different processes, or modules, that may be running
on different operating systems or platforms, connected over a bus or over
a network. The RCS Library supports various different communication protocols
including Transmission Control Protocol (TCP), User Datagram Protocol (UDP),
and Remote Procedure Call (RPC). The communications in NML are message
based and are done using shared memory buffers. The code development is
uniform and does not depend on the particular operating system or platform.
These tools allow different interdependent processes to be located anywhere
and still be connected to each other. For more information on CMS and NML
see
The
NML Programmer's Guide (C++ Version) or The
NML Programmer's Guide (Java Version).
The Communication Management System (CMS) and Neutral Messaging Language
(NML) are two powerful tools of the the RCS Library. They are used for
communication between different processes, or modules, that may be running
on different operating systems or platforms, connected over a bus or over
a network. The RCS Library supports various different communication protocols
including Transmission Control Protocol (TCP), User Datagram Protocol (UDP),
and Remote Procedure Call (RPC). The communications in NML are message
based and are done using shared memory buffers. The code development is
uniform and does not depend on the particular operating system or platform.
These tools allow different interdependent processes to be located anywhere
and still be connected to each other. For more information on CMS and NML
see
The
NML Programmer's Guide (C++ Version) or The
NML Programmer's Guide (Java Version).
![]() The generic RCS control node, NML_MODULE, that combines the NML communication
tools with the RCS control routines. It operates on cyclic intervals and
is designed so that easily it can handle the supervisor-subordinate structure
of RMA. For each cycle time the module automatically checks for commands
from its supervisor, reads the status of its subordinates, performs the
algorithm for the current command, sends commands (if any) to its subordinates,
and presents its status to the supervisor. For more information on the
NML_MODULE see NML_MODULE.
The generic RCS control node, NML_MODULE, that combines the NML communication
tools with the RCS control routines. It operates on cyclic intervals and
is designed so that easily it can handle the supervisor-subordinate structure
of RMA. For each cycle time the module automatically checks for commands
from its supervisor, reads the status of its subordinates, performs the
algorithm for the current command, sends commands (if any) to its subordinates,
and presents its status to the supervisor. For more information on the
NML_MODULE see NML_MODULE.
![]() The
code development in RCS is uniform and system independent. Therefore, a
code developed in one application can easily be ported and reused in another.
Moreover, extending the system is easy and requires minimum code update.
This saves the designer the problem of recoding if there is upgrade of
the system or a change from one hardware (or software) to another.
The
code development in RCS is uniform and system independent. Therefore, a
code developed in one application can easily be ported and reused in another.
Moreover, extending the system is easy and requires minimum code update.
This saves the designer the problem of recoding if there is upgrade of
the system or a change from one hardware (or software) to another.
![]() The RCS Design Tool is a Java based graphical program that the designer
can use to easily layout the modules of his or her controller structure
and generate automatically all of the application independent code. This
includes the code for the command and status messages to be passed between
the modules, the code of the modules, the NML format and update functions,
the NML servers as well as the scripts for compiling and running the application.
The only coding part that is left are the data fields of the messages to
be passed and the algorithms for the commands, since these may vary from
application to application. For more information on the RCS Design Tool
see RCS
Design Tool Instructions.
The RCS Design Tool is a Java based graphical program that the designer
can use to easily layout the modules of his or her controller structure
and generate automatically all of the application independent code. This
includes the code for the command and status messages to be passed between
the modules, the code of the modules, the NML format and update functions,
the NML servers as well as the scripts for compiling and running the application.
The only coding part that is left are the data fields of the messages to
be passed and the algorithms for the commands, since these may vary from
application to application. For more information on the RCS Design Tool
see RCS
Design Tool Instructions.
![]() The RCS Diagnostics Tool is another Java based graphical program
that an operator can use to connect to a running RCS application from a
(possibly) remote host, view its status, and send appropriate commands
to it. The operator can modify (or set) the fields of command messages
before sending them, plot the fields of the status messages, view the current
state of execution in the state table, etc. Scripts needed by the Diagnostics
Tool can automatically be created by the Design Tool, therefore, using
the Diagnostics Tool does not result in any extra programming overhead.
More detailed information on the RCS Diagnostics Tool is available on RCS
Diagnostics Tool Instructions.
The RCS Diagnostics Tool is another Java based graphical program
that an operator can use to connect to a running RCS application from a
(possibly) remote host, view its status, and send appropriate commands
to it. The operator can modify (or set) the fields of command messages
before sending them, plot the fields of the status messages, view the current
state of execution in the state table, etc. Scripts needed by the Diagnostics
Tool can automatically be created by the Design Tool, therefore, using
the Diagnostics Tool does not result in any extra programming overhead.
More detailed information on the RCS Diagnostics Tool is available on RCS
Diagnostics Tool Instructions.
![]() The RCS Library is free of charge. You can download it from the
Intelligent Systems Division's ftp site.
The RCS Library is free of charge. You can download it from the
Intelligent Systems Division's ftp site.
RCS has been implemented and tested on variety of applications including mining, manufacturing systems, autonomous undersea and land vehicles, space station telerobots, post office automation, etc. For more information on applications of the RCS Library see: RCS applications.
If you want to obtain more information on RCS see the web site Real-Time Control Systems (RCS) Library or consult the RCS handbook.
For a syllabus of a laboratory course on RCS see the web site RCS Laboratory Course.
To be automatically sent information on updates to the RCS library, please subscribe to the "nist_rcs" mailing list on http://www.onelist.com