 |
Intelligent Fault Tolerant Engine Control
The Ohio State University and NASA Glenn Research Center, Controls and Dynamics Technology Branch |
 |
|
|
Intelligent Fault Tolerant Engine Control
The Ohio State University and NASA Glenn Research Center, Controls and Dynamics Technology Branch |
|
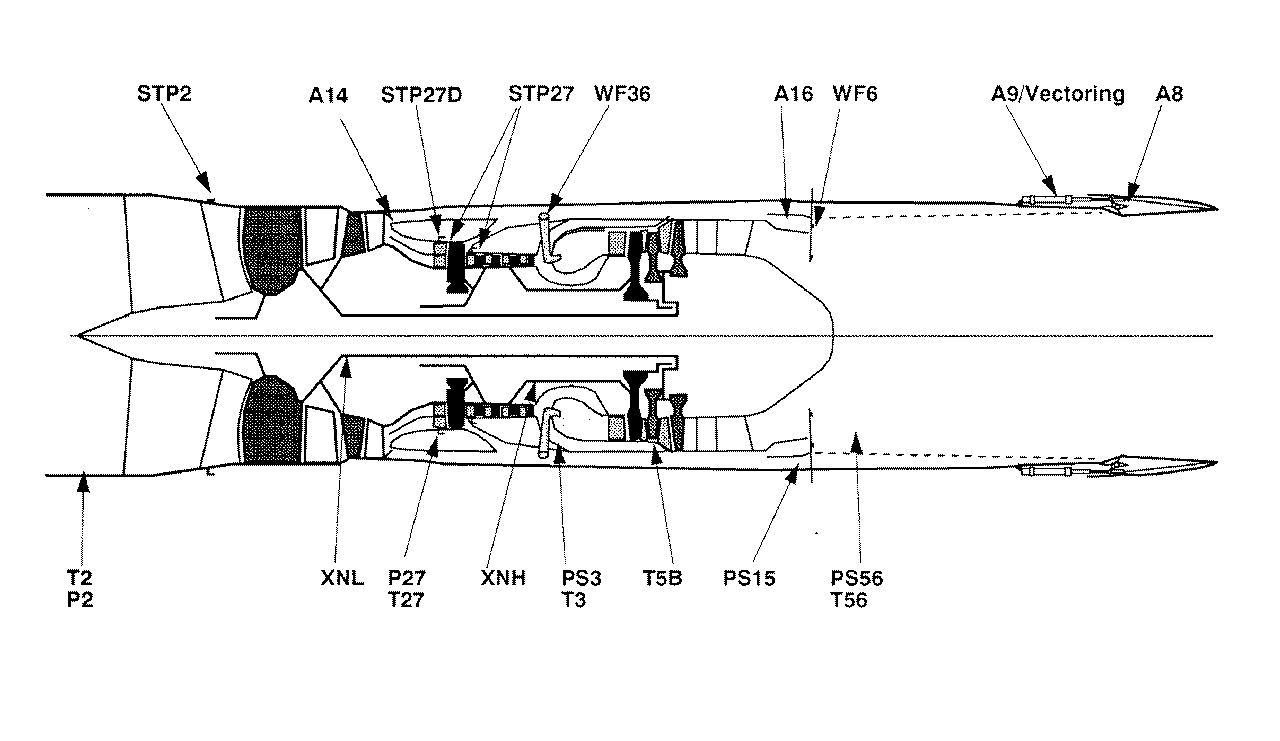
Project Description: Generally, the main objective in aircraft engine control is to regulate thrust while maintaining adequate temperatures and stall margins. Unfortunately, we cannot measure thrust or stall margins so we must infer their values. Often, this inference is not accurate due to manufacturing differences and engine component deterioration, so designs must incorporate large safety margins. If we could accurately estimate "engine performance parameters'' such as thrust and stall margins, we could use these to reduce safety margin requirements and hence lengthen engine life and reduce weight. In addition, if we could estimate "engine quality parameters,'' we could use these in performance parameter estimation and for providing real-time diagnosis of the health of the engine that can be valuable for maintenance and ensuring safe engine operation. The focus of this three year NASA-funded research project, entitled "Intelligent Fault Tolerant Engine Control,'' is on: (1) Year 1 (10/97-9/98): Studying the basic theory of estimation for engine performance and quality parameters and failures, (2) Year 2 (10/98-9/99): Using this theory to construct estimators for these so we can achieve fault diagnostics, and then (3) Year 3 (10/99-9/00): Showing how this estimation and diagnosis information can be used to achieve integrated fault tolerant engine control. The nonlinear techniques for estimation, diagnostics, and fault tolerant control will draw from recent work in fuzzy/neural estimation and control, and there is close collaboration on all efforts with Dr.Shrider Adibhatla of General Electric Aircraft Engines (GEAE).
 |
 |
Jet engines are nonlinear dynamical systems for which an exact mathematical model cannot be used for estimator design, because it is either not available or so complex that it does not fit the necessary assumptions. Thus, classical analytical tools for studying standard system properties like observability, which is very important in estimator design, cannot be directly applied. Generally, for practical jet engine applications, the designer faces two closely related problems: first, given a non-measurable parameter, find the minimal set of estimator inputs that facilitates achieving a satisfactory estimation performance (input selection); second, given a predetermined set of inputs, derive an ``observability'' measure that characterizes the estimation feasibility of a specific non-measurable parameter. In this paper, techniques for solving these two problems are developed and applied to estimator design for jet engine thrust, stall margins, and an unmeasurable state. (Full Text PS)
Fault detection and diagnosis for jet engines is complicated by the presence of engine-to-engine manufacturing differences and engine deterioration during normal operation, the complexity of an accurate engine model, and our inability to directly measure certain engine variables. Here, we work with a sophisticated component level model (CLM) simulation of a turbine engine (XTE46) that can simulate the effects of manufacturing and deterioration differences, in addition to a variety of failures. To develop a fault diagnosis system we begin by using the CLM to generate data that is used by a Levenberg-Marquardt method to train a Takagi-Sugeno fuzzy system to represent the engine. The multiple copies of this nonlinear model, each representing a different failure, are then used to generate error residuals by comparing them to the engine output. In fact, we manage the composition of the set of models with a supervisor that ensures the appropriate models are on-line, and that processes the error residuals to detect and identify faults. The robustness of the approach is analyzed and several simulations are conducted to illustrate the effectiveness of the method. (Full Text PS)
This paper introduces a new approach for output feedback stabilization of SISO systems which, unlike most of the techniques found in the literature, does not use high-gain observers and control input saturation to achieve separation between the state feedback and observer designs. Rather, we show that by using nonlinear observers, together with a projection algorithm, the same kind of separation principle is achieved for a larger class of systems, namely stabilizable and incompletely observable plants. Furthermore, this new approach avoids using knowledge of the inverse of the observability mapping, which is needed by most techniques in the literature when controlling general stabilizable systems. (Full Text PS)
The problem of controlling surge and stall in jet engine compressors is of fundamental importance in preventing damage and lengthening the life of these components. In this paper, we use the Moore-Greitzer mathematical model to develop an output feedback controller for these two instabilities (only one of the three states is measurable). This problem is particularly challenging since the system is not completely observable and, hence, none of the output feedback control techniques found in the literature can be applied to recover the performance of a full state feedback controller. However, we show how to successfully solve it by using a novel output feedback approach for the stabilization of general stabilizable and incompletely observable systems. (Full Text PS)
Stable indirect and direct adaptive controllers are applied to achieve fault tolerant engine control by using Takagi-Sugeno fuzzy systems to learn the unknown dynamics caused by faults and to accommodate faults by updating the controller, and this nonlinear model provides a priori knowledge about the nominal engine dynamics. We prove that both adaptive schemes achieve asymptotic tracking. The performance of the fault tolerant indirect and direct adaptive controllers is demonstrated through the component level model simulation of the General Electric XTE46 engine. (Full Text PS)
From the point of view of information processing the immune system is a highly parallel and distributed intelligent system which has learning, memory, and associative retrieval capabilities. In this paper we present two immunity-based hybrid learning approaches for function approximation (or regression) problems that involve adjusting the structure and parameters of spatially localized models (e.g., radial basis function networks or Takagi-Sugeno fuzzy systems) to interpolate data. The number and centers of the receptive fields for local models are specified by immunity-based structure adaptation algorithms, while the parameters of the local models, which enter in a linear fashion, are tuned separately using a least squares method. The effectiveness of the procedure is demonstrated through a nonlinear function approximation problem and a nonlinear dynamical system modeling problem. (Full Text PS)
A new output feedback controller is introduced for general MIMO nonlinear systems which are only observable on regions of the state and input spaces.(Full Text PS)
Stable indirect and direct adaptive controllers are presented for a class of input-output feedback linearizable time-varying nonlinear systems. The radial basis function neural networks are used as on-line approximators to learn the time-varying characteristics of system parameters. Stability results are given and the performance of the indirect and direct adaptive schemes is demonstrated through a fault tolerant engine control problem where the faults are naturally time varying. (Full Text PS)
We propose an adaptive control methodology for a class of nonlinear systems with a time-varying structure. This class of systems is composed of interpolations of nonlinear subsystems which are input-output feedback linearizable. Both indirect and direct adaptive control methods are developed, where the spatially localized models (in the form of Takagi-Sugeno fuzzy systems or radial basis function neural networks) are used as on-line approximators to learn the unknown dynamics of the system. Without assumptions on rate of change of system dynamics, the proposed adaptive control methods guarantee that all internal signals of the system are bounded and the tracking error is asymptotically stable. The performance of the adaptive controller is demonstrated using a jet engine control problem. (Full Text PS)
Fault tolerant control for nonlinear time-varying systems is of both theoretical and practical importance. Here we present an intelligent fault tolerant control methodology using an on-line approximation based adaptive controller to try to achieve system stability and robustness and a fault diagnosis unit to provide fault information and then reconfigure the control law. Simulation examples for a fault tolerant engine control problem are given to demonstrate the effectiveness of the proposed scheme. (Full Text PS)
Last updated: 12/4/00